
Max Pascher
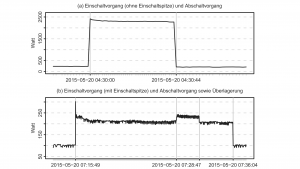
Praxisbeispiel Digitalisierung konkret: Wenn der Stromzähler weiß, ob es Oma gut geht. Beschreibung des minimalinvasiven Frühwarnsystems „ZELIA“ Book Chapter
In: Michael Vilain (Ed.): pp. 137-148, Nomos Verlagsgesellschaft mbH & Co. KG, 2020, ISBN: 78-3-8487-6621-5.
BibTeX | Links:
@inbook{Pascher2020,
title = {Praxisbeispiel Digitalisierung konkret: Wenn der Stromzähler weiß, ob es Oma gut geht. Beschreibung des minimalinvasiven Frühwarnsystems „ZELIA“},
author = {Max Pascher},
editor = {Michael Vilain},
doi = {10.5771/9783748907008-137},
isbn = {78-3-8487-6621-5},
year = {2020},
date = {2020-10-06},
urldate = {2020-10-06},
pages = {137-148},
publisher = {Nomos Verlagsgesellschaft mbH & Co. KG},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
Stephanie Arévalo-Arboleda; Max Pascher; Younes Lakhnati; Jens Gerken
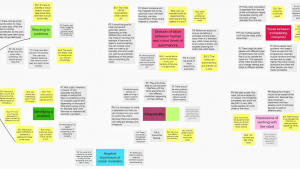
Understanding Human-Robot Collaboration for People with Mobility Impairments at the Workplace, a Thematic Analysis Proceedings Article
In: RO-MAN 2020 - IEEE International Conference on Robot and Human Interactive Communication, IEEE, 2020, ISBN: 978-1-7281-6075-7.
@inproceedings{Arévalo-Arboleda2020,
title = {Understanding Human-Robot Collaboration for People with Mobility Impairments at the Workplace, a Thematic Analysis},
author = {Stephanie Arévalo-Arboleda and Max Pascher and Younes Lakhnati and Jens Gerken},
doi = {10.1109/RO-MAN47096.2020.9223489},
isbn = {978-1-7281-6075-7},
year = {2020},
date = {2020-07-31},
urldate = {2020-07-31},
booktitle = {RO-MAN 2020 - IEEE International Conference on Robot and Human Interactive Communication},
publisher = {IEEE},
abstract = {Assistive technologies, in particular human-robot collaboration, have the potential to ease the life of people with physical mobility impairments in social and economic activities. Currently, this group of people has lower rates of economic participation, due to the lack of adequate environments adapted to their capabilities. We take a closer look at the needs and preferences of people with physical mobility impairments in a human-robot cooperative environment at the workplace. Specifically, we aim to design how to control a robotic arm in manufacturing tasks for people with physical mobility impairments. We present a case study of a shelteredworkshop as a prototype for an institution that employs people with disabilities in manufacturing jobs. Here, we collected data of potential end-users with physical mobility impairments, social workers, and supervisors using a Participatory Design technique (Future-Workshop). These stakeholders were divided into two groups, end-users and supervising personnel (social workers, supervisors), which were run across two separate sessions. The gathered information was analyzed using thematic analysis to reveal underlying themes across stakeholders. We identified concepts that highlight underlying concerns related to the robot fitting into the social and organizational structure, human-robot synergy, and human-robot problem management. In this paper, we present our findings and discuss the implications of each theme when shaping an inclusive humanrobot cooperative workstation for people with physical mobility impairments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Max Pascher; Stefan Schneegass; Jens Gerken
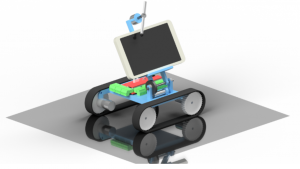
SwipeBuddy: A Teleoperated Tablet and Ebook-Reader Holder for a Hands-Free Interaction Proceedings Article
In: David Lamas; Fernando Loizides; Lennart Nacke; Helen Petrie; Marco Winckler; Panayiotis Zaphiris (Ed.): Human-Computer Interaction – INTERACT 2019, pp. 568-571, Springer, Cham, 2019, ISBN: 978-3-030-29390-1.
@inproceedings{Pascher2019b,
title = {SwipeBuddy: A Teleoperated Tablet and Ebook-Reader Holder for a Hands-Free Interaction},
author = {Max Pascher and Stefan Schneegass and Jens Gerken},
editor = {David Lamas and Fernando Loizides and Lennart Nacke and Helen Petrie and Marco Winckler and Panayiotis Zaphiris},
url = {https://youtu.be/EZ5YSRRO_2o},
doi = {10.1007/978-3-030-29390-1_39},
isbn = {978-3-030-29390-1},
year = {2019},
date = {2019-08-23},
urldate = {2019-08-23},
booktitle = {Human-Computer Interaction – INTERACT 2019},
volume = {11749},
pages = {568-571},
publisher = {Springer, Cham},
abstract = {Mobile devices are the core computing platform we use in our everyday life to communicate with friends, watch movies, or read books. For people with severe physical disabilities, such as tetraplegics, who cannot use their hands to operate such devices, these devices are barely usable. Tackling this challenge, we propose SwipeBuddy, a teleoperated robot allowing for touch interaction with a smartphone, tablet, or ebook-reader. The mobile device is mounted on top of the robot and can be teleoperated by a user through head motions and gestures controlling a stylus simulating touch input. Further, the user can control the position and orientation of the mobile device. We demonstrate the SwipeBuddy robot device and its different interaction capabilities.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher; Annalies Baumeister; Barbara Klein; Stefan Schneegass; Jens Gerken
Little Helper: A Multi-Robot System in Home Health Care Environments Proceedings Article
In: Proceedings of the 2019 International workshop on Human-Drone Interaction (iHDI) as part of the ACM Conference on Human Factors in Computing Systems, ACM 2019.
@inproceedings{Pascher2019,
title = {Little Helper: A Multi-Robot System in Home Health Care Environments},
author = {Max Pascher and Annalies Baumeister and Barbara Klein and Stefan Schneegass and Jens Gerken},
url = {https://hal.archives-ouvertes.fr/hal-02128382},
year = {2019},
date = {2019-05-04},
urldate = {2019-05-04},
booktitle = {Proceedings of the 2019 International workshop on Human-Drone Interaction (iHDI) as part of the ACM Conference on Human Factors in Computing Systems},
organization = {ACM},
abstract = {Being able to live independently and self-determined in once own home is a crucial factor for social participation. For people with severe physical impairments, such as tetraplegia, who cannot use their hands to manipulate materials or operate devices, life in their own home is only possible with assistance from others. The inability to operate buttons and other interfaces results also in not being able to utilize most assistive technologies on their own. In this paper, we present an ethnographic field study with 15 tetraplegics to better understand their living environments and needs. Results show the potential for robotic solutions but emphasize the need to support activities of daily living (ADL), such as grabbing and manipulating objects or opening doors. Based on this, we propose Little Helper, a tele-operated pack of robot drones, collaborating in a divide and conquer paradigm to fulfill several tasks using a unique interaction method. The drones can be tele-operated by a user through gaze-based selection and head motions and gestures manipulating materials and applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jonas Auda; Max Pascher; Stefan Schneegass
Around the (Virtual) World: Infinite Walking in Virtual Reality Using Electrical Muscle Stimulation Proceedings Article
In: Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, 2019, ISBN: 978-1-4503-5970-2/19/05.
@inproceedings{Auda2019,
title = {Around the (Virtual) World: Infinite Walking in Virtual Reality Using Electrical Muscle Stimulation},
author = {Jonas Auda and Max Pascher and Stefan Schneegass},
doi = {10.1145/3290605.3300661},
isbn = {978-1-4503-5970-2/19/05},
year = {2019},
date = {2019-04-18},
urldate = {2019-04-18},
booktitle = {Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems},
abstract = {Virtual worlds are infinite environments in which the user can move around freely. When shifting from controller based movement to regular walking as input, the limitation of the real world also limits the virtual world. Tackling this challenge, we propose the use of electrical muscle stimulation to limit the necessary real world space to create an unlimited walking experience. We thereby actuate the users' legs in a way that they deviate from their straight route and, thus, walk in circles in the real world world while still walking straight in the virtual world. We report on a study comparing this approach to vision shift - the state of the art approach - as well as combining both approaches. The results show that particularly combining both approaches yield high potential to create an infinite walking experience.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher; Lukas Wöhle
SwipeTank - A teleoperated tablet and ebook-reader holder for a hands-free interaction Working paper
2018.
@workingpaper{Pascher2018,
title = {SwipeTank - A teleoperated tablet and ebook-reader holder for a hands-free interaction},
author = {Max Pascher and Lukas Wöhle},
year = {2018},
date = {2018-10-14},
urldate = {2018-10-14},
abstract = {This extended abstracts provides a contribution for the Student Innovation Contest of the UIST'18. We will build a tank-like tablet and ebook-reader that can be teleoperated by a user through headmotion and gestures to provide a hands-free interaction mode.},
keywords = {},
pubstate = {published},
tppubtype = {workingpaper}
}

Annalies Baumeister; Max Pascher; Roland Thietje; Jens Gerken; Barbara Klein
Anforderungen an die Interaktion eines Roboterarms zur Nahrungsaufnahme bei Tetraplegie – Eine ethnografische Analyse Proceedings Article
In: Kongress und Ausstellung zu Alltagsunterstützenden Assistenzlösungen / Active Assisted Living (AAL) - Tagungsband, pp. 100-101, Karlsruher Messe- und Kongress GmbH Karlsruhe, Germany, 2018.
@inproceedings{Baumeister2018,
title = {Anforderungen an die Interaktion eines Roboterarms zur Nahrungsaufnahme bei Tetraplegie – Eine ethnografische Analyse},
author = {Annalies Baumeister and Max Pascher and Roland Thietje and Jens Gerken and Barbara Klein},
year = {2018},
date = {2018-10-11},
urldate = {2018-10-11},
booktitle = {Kongress und Ausstellung zu Alltagsunterstützenden Assistenzlösungen / Active Assisted Living (AAL) - Tagungsband},
pages = {100-101},
address = {Karlsruhe, Germany},
organization = {Karlsruher Messe- und Kongress GmbH},
abstract = {Selbstständig und selbstbestimmt essen und trinken zu können gehört zu den Grundbedürfnissen des Menschen und wird den Aktivitäten des täglichen Lebens (ATLs) zugeordnet.
Körperliche Beeinträchtigungen, die mit Funktionsverlusten in Armen, Händen und ggf. der Beweglichkeit des Oberkörpers einhergehen, schränken die selbstständige Nahrungszufuhr erheblich ein. Die Betroffenen sind darauf angewiesen, dass ihnen Getränke und Mahlzeiten zubereitet, bereitgestellt und angereicht werden. Zu dieser Personengruppe gehören Menschen mit querschnittbedingter Tetraplegie, Multiple Sklerose, Muskeldystrophie und Erkrankungen mit ähnlichen Auswirkungen. Derzeit gibt es verschiedene assistive Technologien, die das selbstständige Essen und Trinken wieder ermöglichen sollen – darunter Essapparate, die auf einem Tisch platziert werden (z.B. iEat
, Obi), sowie an einem E-Rollstuhl befestigte Roboterarme (z.B. Jaco, iArm). Diesen Produkten ist gemeinsam, dass für die Bedienung Restfunktionen in Armen, Händen und Oberkörper benötigt werden. Wie aber muss ein Interaktionsdesign für einen Roboterarm gestaltet sein, damit er von den Betroffenen zur Nahrungsaufnahme genutzt werden kann? Welche Anforderungen gibt es und welche Aspekte sind in Bezug auf die Akzeptanz eines Roboterarms zu berücksichtigen? },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Körperliche Beeinträchtigungen, die mit Funktionsverlusten in Armen, Händen und ggf. der Beweglichkeit des Oberkörpers einhergehen, schränken die selbstständige Nahrungszufuhr erheblich ein. Die Betroffenen sind darauf angewiesen, dass ihnen Getränke und Mahlzeiten zubereitet, bereitgestellt und angereicht werden. Zu dieser Personengruppe gehören Menschen mit querschnittbedingter Tetraplegie, Multiple Sklerose, Muskeldystrophie und Erkrankungen mit ähnlichen Auswirkungen. Derzeit gibt es verschiedene assistive Technologien, die das selbstständige Essen und Trinken wieder ermöglichen sollen – darunter Essapparate, die auf einem Tisch platziert werden (z.B. iEat
, Obi), sowie an einem E-Rollstuhl befestigte Roboterarme (z.B. Jaco, iArm). Diesen Produkten ist gemeinsam, dass für die Bedienung Restfunktionen in Armen, Händen und Oberkörper benötigt werden. Wie aber muss ein Interaktionsdesign für einen Roboterarm gestaltet sein, damit er von den Betroffenen zur Nahrungsaufnahme genutzt werden kann? Welche Anforderungen gibt es und welche Aspekte sind in Bezug auf die Akzeptanz eines Roboterarms zu berücksichtigen?

Stephanie Arévalo-Arboleda; Max Pascher; Jens Gerken
Opportunities and Challenges in Mixed-Reality for an Inclusive Human-Robot Collaboration Environment Proceedings Article
In: Proceedings of the 2018 International Workshop on Virtual, Augmented, and Mixed Reality for Human-Robot Interactions (VAM-HRI) as part of the ACM/IEEE Conference on Human-Robot Interaction, pp. 83–86, Chicago, IL, USA, 2018.
@inproceedings{Arévalo-Arboleda2018,
title = {Opportunities and Challenges in Mixed-Reality for an Inclusive Human-Robot Collaboration Environment},
author = {Stephanie Arévalo-Arboleda and Max Pascher and Jens Gerken},
year = {2018},
date = {2018-03-05},
urldate = {2018-03-05},
booktitle = {Proceedings of the 2018 International Workshop on Virtual, Augmented, and Mixed Reality for Human-Robot Interactions (VAM-HRI) as part of the ACM/IEEE Conference on Human-Robot Interaction},
pages = {83--86},
address = {Chicago, IL, USA},
abstract = {This paper presents an approach to enhance robot control using Mixed-Reality. It highlights the opportunities and challenges in the interaction design to achieve a Human-Robot Collaborative environment. In fact, Human-Robot Collaboration is the perfect space for social inclusion. It enables people, who suffer severe physical impairments, to interact with the environment by providing them movement control of an external robotic arm. Now, when discussing about robot control it is important to reduce the visual-split that different input and output modalities carry. Therefore, Mixed-Reality is of particular interest when trying to ease communication between humans and robotic systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher
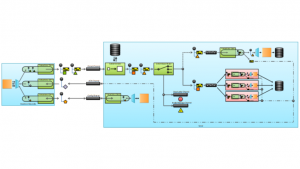
Konzeption und prototypische Realisierung einer Software-Architektur für ein verteiltes System zur Aufzeichnung, Verarbeitung und Analyse von Energieverbrauchswerten Masters Thesis
Westphalian University of Applied Sciences, 2015.
@mastersthesis{Pascher2015,
title = {Konzeption und prototypische Realisierung einer Software-Architektur für ein verteiltes System zur Aufzeichnung, Verarbeitung und Analyse von Energieverbrauchswerten},
author = {Max Pascher},
year = {2015},
date = {2015-08-25},
urldate = {2015-08-25},
school = {Westphalian University of Applied Sciences},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}