

José Creissac Campos; Camille Fayollas; Kris Luyten; Philippe Palanque; Emanuele Panizzi; Max Pascher; Fabio Paternò; Lucio Davide Spano
Fourth Workshop on Engineering Interactive Systems Embedding AI Technologies Proceedings Article
In: Companion Proceedings of the 18th ACM SIGCHI Symposium on Engineering Interactive Computing Systems, pp. 95–99, Association for Computing Machinery, New York, NY, USA, 2026, ISBN: 9798400726699.
@inproceedings{Campos2026,
title = {Fourth Workshop on Engineering Interactive Systems Embedding AI Technologies},
author = { José Creissac Campos and Camille Fayollas and Kris Luyten and Philippe Palanque and Emanuele Panizzi and Max Pascher and Fabio Paternò and Lucio Davide Spano},
url = {https://sites.google.com/view/eiseait2026/},
doi = {10.1145/3807968.3822519},
isbn = {9798400726699},
year = {2026},
date = {2026-06-29},
urldate = {2026-06-29},
booktitle = {Companion Proceedings of the 18th ACM SIGCHI Symposium on Engineering Interactive Computing Systems},
pages = {95–99},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {EICS '26 Companion},
abstract = {This proposal is the fourth edition of a workshop previously held at EICS 2023, 2024 and 2025. This edition aims to bring together researchers and practitioners interested in the engineering of interactive systems that embed AI technologies (e.g. AI-based recommender systems) or that use AI during the engineering lifecycle of interactive systems. The overall objective is to identify (based on experience reported by participants) methods, techniques, and tools to support the use and inclusion of AI technologies throughout the engineering lifecycle for interactive systems. A specific focus is on guaranteeing that user-relevant properties such as usability and user experience are accounted for. Contributions are also expected to address system-related properties, such as resilience, dependability, reliability, safety, security or performance. Another focus is on the identification and definition of software architectures supporting this integration in a generic way, ensuring properties such as maintainability and reusability.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher; Jens Gerken
Interacting with Adaptive AI in Assistive Human-Robot Interaction Best Paper Proceedings Article
In: The 3rd InterAI Workshop: Interactive AI for Human-Centered Robotics @ CHI 2026, 2026.
@inproceedings{Pascher2026,
title = {Interacting with Adaptive AI in Assistive Human-Robot Interaction},
author = {Max Pascher and Jens Gerken},
url = {https://sites.google.com/view/interaiworkshopchi2026/home, Workshop Homepage
https://openreview.net/attachment?id=GVHvYfjvVP&name=pdf, PDF Download},
doi = {10.13140/RG.2.2.30435.11045},
year = {2026},
date = {2026-04-13},
urldate = {2026-04-13},
booktitle = {The 3rd InterAI Workshop: Interactive AI for Human-Centered Robotics @ CHI 2026},
abstract = {Adaptive AI systems are increasingly embedded in everyday environments and support users beyond isolated task execution. In assistive Human-Robot Interaction (HRI), such systems operate in long-term, context-dependent, and safety-relevant settings. These characteristics impose constraints on adaptivity, autonomy, and transparency that are insufficiently addressed in much current research on interactive AI. This position paper argues that assistive HRI provides a suitable domain for examining fundamental challenges of human-AI interaction. Based on prior work in assistive and context-ware interaction, the paper identifies core interactional tensions and derives design implications for future research.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Kirill Kronhardt; Aaron Zilt; Omed Abed; Martin Johannes Lehnert; Max Pascher; Jens Gerken
FallacyCheck - A Proactive LLM-based Browser Extension to Motivate Critical Assessment of News Articles by Questioning Logical Fallacies Best Demo Proceedings Article
In: Proceedings of the 24th International Conference on Mobile and Ubiquitous Multimedia, pp. 504–509, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400720154.
@inproceedings{Kronhardt2025b,
title = {FallacyCheck - A Proactive LLM-based Browser Extension to Motivate Critical Assessment of News Articles by Questioning Logical Fallacies},
author = {Kirill Kronhardt and Aaron Zilt and Omed Abed and Martin Johannes Lehnert and Max Pascher and Jens Gerken},
doi = {10.1145/3771882.3774253},
isbn = {9798400720154},
year = {2025},
date = {2025-11-30},
urldate = {2025-11-30},
booktitle = {Proceedings of the 24th International Conference on Mobile and Ubiquitous Multimedia},
pages = {504–509},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {MUM '25},
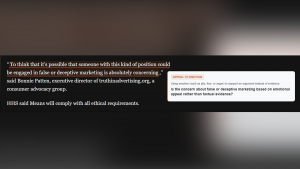
abstract = {We present FallacyCheck, a proactive Large Language Model (LLM)-based browser extension designed to motivate the critical assessment of news articles by questioning logical fallacies. Existing LLM-based extensions are reactive, limiting their ability to inoculate users against information disorder. FallacyCheck overcomes this by proactively identifying logical fallacies, such as "Appeal to Emotion" and "Ad Hominem", and most importantly, motivating users to critically assess the article by posing them a thought-provoking, non-leading question in a contextual tooltip. This design, rooted in inoculation theory, prompts users toward meta-cognitive reflection on the argument’s logical structure. A preliminary evaluation with 16 highschool students showed the tool was perceived to be easy to use, and the questions helped to stimulate critical thinking. Crucially, participants generally would not have posed these critical questions without the tool’s support.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Kirill Kronhardt; Martin Johannes Lehnert; Max Pascher; Jens Gerken
The Proactive Gap: A Scoping Review of Publicly Available LLM-based Browser Extensions and Their Potential to Mitigate Information Disorder Proceedings Article
In: Proceedings of the 24th International Conference on Mobile and Ubiquitous Multimedia, pp. 1–12, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400720154.
@inproceedings{Kronhardt2025c,
title = {The Proactive Gap: A Scoping Review of Publicly Available LLM-based Browser Extensions and Their Potential to Mitigate Information Disorder},
author = {Kirill Kronhardt and Martin Johannes Lehnert and Max Pascher and Jens Gerken},
doi = {10.1145/3771882.3771896},
isbn = {9798400720154},
year = {2025},
date = {2025-11-30},
urldate = {2025-11-30},
booktitle = {Proceedings of the 24th International Conference on Mobile and Ubiquitous Multimedia},
pages = {1–12},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {MUM '25},
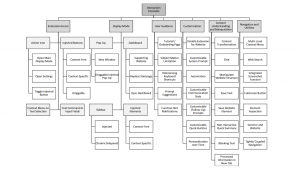
abstract = {Information disorder — including misinformation, disinformation, and malinformation — continues to undermine public discourse. Large language model (LLM)-based browser extensions show promise as tools for intervention, yet the role of publicly available tools in this space is not well understood. We conducted a scoping review of the Chrome Web Store and Firefox Add-Ons Store (May–July 2025), screening 951 records and including 34 extensions that use LLMs to process webpage content or user input. Through thematic analysis, we identified six interaction design concept categories: Extension Access, Display Mode, User Guidance, Customization, Content Understanding & Manipulation, and Navigation & Utilities. While extensions demonstrated diverse functionality and potential to debunk information disorder, they overwhelmingly operated as reactive tools, requiring explicit user initiation. Moreover, they rarely embedded themselves within webpage context. These findings reveal a “proactive gap” in current designs. Future LLM-powered extensions should move beyond responsiveness toward proactive, context-aware interventions that inoculate users against misinformation and strengthen critical thinking.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Mario Heinz-Jakobs; Sinem Görmez; Hailey L Johnson; Jens Gerken; Max Pascher; Giulia Barbareschi; Saminda Sundeepa Balasuriya; Laurianne Sitbon; Carsten Röcker
AT@Work: Intelligent Assistive Technologies for Enabling Workplace Inclusion Proceedings Article
In: Proceedings of the 27th International ACM SIGACCESS Conference on Computers and Accessibility, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400706769.
@inproceedings{Heinz-Jakobs2025,
title = {AT@Work: Intelligent Assistive Technologies for Enabling Workplace Inclusion},
author = {Mario Heinz-Jakobs and Sinem Görmez and Hailey L Johnson and Jens Gerken and Max Pascher and Giulia Barbareschi and Saminda Sundeepa Balasuriya and Laurianne Sitbon and Carsten Röcker},
doi = {10.1145/3663547.3748637},
isbn = {9798400706769},
year = {2025},
date = {2025-10-22},
urldate = {2025-10-22},
booktitle = {Proceedings of the 27th International ACM SIGACCESS Conference on Computers and Accessibility},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {ASSETS '25},
abstract = {Digital assistive technologies (ATs) have been widely used to support people with disabilities at work. However, many existing systems, interfaces, and tools remain inaccessible or insufficiently adaptable to the wide range of human abilities, particularly when cognitive, communicative, or sensory differences are involved. This gap is further exacerbated by what scholars and activists refer to as the disability divide: the sociotechnical disparity between people with and without disabilities in terms of access to, use of, and benefits from digital technologies. Despite increasing policy efforts and legal frameworks, vocational inclusion and training remains a significant challenge. By bringing together a diverse community, this workshop seeks to critically examine the role of digital ATs in advancing vocational inclusion for individuals with disabilities.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Kirill Kronhardt; Sebastian Hoffmann; Fabian Adelt; Max Pascher; Jens Gerken
All of That in 15 Minutes? Exploring Privacy Perceptions Across Cognitive Abilities via Ad-hoc LLM-Generated Profiles Inferred from Social Media Use Proceedings Article
In: Proceedings of the 27th International Conference on Multimodal Interaction, pp. 164–172, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400714993.
@inproceedings{Kronhardt2025,
title = {All of That in 15 Minutes? Exploring Privacy Perceptions Across Cognitive Abilities via Ad-hoc LLM-Generated Profiles Inferred from Social Media Use},
author = {Kirill Kronhardt and Sebastian Hoffmann and Fabian Adelt and Max Pascher and Jens Gerken},
doi = {10.1145/3716553.3750814},
isbn = {9798400714993},
year = {2025},
date = {2025-10-12},
urldate = {2025-10-12},
booktitle = {Proceedings of the 27th International Conference on Multimodal Interaction},
pages = {164–172},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
abstract = {Social media platforms use multimodal data (e.g., text, images, behavioral patterns) to infer user characteristics for algorithmic profiling. To comply with privacy regulations like the GDPR, companies provide transparency tools, which are often hard for users to interpret—especially individuals with cognitive impairments (CIs), whose specific needs remain underexplored. It is still unclear (1) what information users need and (2) how it should be effectively and accessibly represented. We investigate transparency needs across cognitive abilities, using Large Language Models (LLMs) to create more understandable representations of profiling. An exploratory study with 45 participants—30 without CIs and 15 with CIs—was conducted under three conditions. After 15 minutes of social media browsing, participants received either (1) a verbal explanation of profiling, (2) LLM-generated interest segments, or (3) LLM-generated user personas (in general or Easy-to-Read German for participants with CIs), followed by a semi-structured interview. Thematic analysis of transcripts revealed concerns about data sensitivity, perceived consequences, and the influence of cognitive abilities. Merely showing users collected or inferred data—regardless of format—may not meet user transparency needs. Our findings suggest transparency tools must go beyond data representation to explain inference mechanisms and potential outcomes, tailored to the sensitivities of different cognitive user groups.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Giuseppe Sanseverino; Max Pascher; Lewis Chuang; Jens Gerken
Teleoperation Redefined: Exploring Wearable Interfaces for Natural Interaction Proceedings Article
In: Mensch und Computer 2025 - Workshopband, Gesellschaft für Informatik e.V. 2025.
@inproceedings{Sanseverino2025,
title = {Teleoperation Redefined: Exploring Wearable Interfaces for Natural Interaction},
author = {Giuseppe Sanseverino and Max Pascher and Lewis Chuang and Jens Gerken},
url = {https://www.wearableteleoperation.net/, Workshop Website},
doi = {10.18420/muc2025-mci-ws-113},
year = {2025},
date = {2025-08-25},
urldate = {2025-08-25},
booktitle = {Mensch und Computer 2025 - Workshopband},
organization = {Gesellschaft für Informatik e.V.},
abstract = {The increasing presence of computers, robots, and otherware in daily life and workplaces is transforming human-computer interaction (HCI), leading to critical questions about collaboration, trust, and control interfaces. Despite their efficiency, these systems are often controlled by interfaces that are complex for the human operator to understand, thus leading to poor, unnatural interaction. Wearable sensor technologies offer a promising alternative by enabling more natural, adaptive, and multimodal interaction paradigms. However, despite their potential, wearable interfaces face significant challenges, including a lack of validation, limited standardization, and the absence of accessible prototyping tools. This workshop gathers experts in interface design, robotics, wearables, and teleoperation to explore strategies for simplifying and accelerating the prototyping process. Through expert presentations and a hands-on prototyping session, the workshop aims to define key design principles, address technical challenges, and promote accessible prototyping strategies, ultimately advancing wearable interaction design in HCI and teleoperation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Jan Leusmann; Pooja Prajod; Alex Binh Vinh Duc Nguyen; Max Pascher; Andrew Vande Moere; Sven Mayer
The Future of Human-Robot Synergy in Interactive Environments: The Role of Robots at the Workplace Proceedings Article
In: Adjunct Proceedings of the 4th Annual Symposium on Human-Computer Interaction for Work, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400713972.
@inproceedings{Leusmann2025,
title = {The Future of Human-Robot Synergy in Interactive Environments: The Role of Robots at the Workplace},
author = {Jan Leusmann and Pooja Prajod and Alex Binh Vinh Duc Nguyen and Max Pascher and Andrew Vande Moere and Sven Mayer},
url = {https://www.hcilab.org/human-robot-synergy-workplace-2025/, Workshop Website},
doi = {10.1145/3707640.3729210},
isbn = {9798400713972},
year = {2025},
date = {2025-06-23},
urldate = {2025-06-23},
booktitle = {Adjunct Proceedings of the 4th Annual Symposium on Human-Computer Interaction for Work},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {CHIWORK '25 Adjunct},
abstract = {The increasing integration of robots into workplaces raises critical questions about human-robot synergy in interactive environments. While robots are designed to enhance productivity and safety, their successful deployment depends on effective collaboration, trust, and seamless interaction with human workers. However, existing research has primarily focused on either technical capabilities or human-centered concerns in isolation, leaving a gap in understanding how robots can be meaningfully integrated into dynamic workspaces. In this workshop, we bring together experts from robotics, HCI, and work sciences to explore the future of human-robot collaboration at the workplace. This workshop aims to identify key design principles, ethical considerations, and practical challenges. The insights gained will inform future research and policy recommendations, shaping a future in which robots act not as mere tools but as cooperative agents that enhance workplace efficiency, well-being, and innovation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Felix Ferdinand Goldau*; Max Pascher*; Annalies Baumeister*; Patrizia Tolle; Jens Gerken; Udo Frese
Adaptive Control in Assistive Application – A Study Evaluating Shared Control by Users with Limited Upper Limb Mobility Proceedings Article
In: RO-MAN 2024 - IEEE International Conference on Robot and Human Interactive Communication, IEEE, 2024.
@inproceedings{Goldau2024,
title = {Adaptive Control in Assistive Application – A Study Evaluating Shared Control by Users with Limited Upper Limb Mobility},
author = {Felix Ferdinand Goldau* and Max Pascher* and Annalies Baumeister* and Patrizia Tolle and Jens Gerken and Udo Frese},
doi = {10.1109/RO-MAN60168.2024.10731229},
year = {2024},
date = {2024-10-30},
urldate = {2024-10-30},
booktitle = {RO-MAN 2024 - IEEE International Conference on Robot and Human Interactive Communication},
publisher = {IEEE},
abstract = {Shared control in assistive robotics blends human autonomy with computer assistance, thus simplifying complex tasks for individuals with physical impairments. This study assesses an adaptive Degrees of Freedom control method specifically tailored for individuals with upper limb impairments. It employs a between-subjects analysis with 24 participants, conducting 81 trials across three distinct input devices in a realistic everyday-task setting. Given the diverse capabilities of the vulnerable target demographic and the known challenges in statistical comparisons due to individual differences, the study focuses primarily on subjective qualitative data. The results reveal consistently high success rates in trial completions, irrespective of the input device used. Participants appreciated their involvement in the research process, displayed a positive outlook, and quick adaptability to the control system. Notably, each participant effectively managed the given task within a short time frame. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Khaled Kassem; Alia Saad; Max Pascher; Martin Schett; Florian Michahelles
Push Me: Evaluating Usability and User Experience in Nudge-based Human-Robot Interaction through Embedded Force and Torque Sensors Honorable Mention Proceedings Article
In: Proceedings of Mensch Und Computer 2024, pp. 399–407, Association for Computing Machinery, Karlsruhe, Germany, 2024, ISBN: 9798400709982.
@inproceedings{Kassem2024,
title = {Push Me: Evaluating Usability and User Experience in Nudge-based Human-Robot Interaction through Embedded Force and Torque Sensors},
author = {Khaled Kassem and Alia Saad and Max Pascher and Martin Schett and Florian Michahelles},
doi = {10.1145/3670653.3677487},
isbn = {9798400709982},
year = {2024},
date = {2024-09-01},
urldate = {2024-09-01},
booktitle = {Proceedings of Mensch Und Computer 2024},
pages = {399–407},
publisher = {Association for Computing Machinery},
address = {Karlsruhe, Germany},
series = {MuC '24},
abstract = {Robots are expected to be integrated into human workspaces, which makes the development of effective and intuitive interaction crucial. While vision- and speech-based robot interfaces have been well studied, direct physical interaction has been less explored. However, HCI research has shown that direct manipulation interfaces provide more intuitive and satisfying user experiences, compared to other interaction modes. This work examines how built-in force/torque sensors in robots can facilitate direct manipulation through nudge-based interactions. We conducted a user study (N = 23) to compare this haptic approach with traditional touchscreen interfaces, focusing on workload, user experience, and usability. Our results show that haptic interactions are more engaging and intuitive but also more physically demanding compared to touchscreen interaction. These findings have implications for the design of physical human-robot interaction interfaces. Given the benefits of physical interaction highlighted in our study, we recommend that designers incorporate this interaction method for human-robot interaction, especially at close quarters.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Max Pascher
An Interaction Design for AI-enhanced Assistive Human-Robot Collaboration PhD Thesis
2024, ISBN: 978-3-00-079648-7.
@phdthesis{Pascher2024e,
title = {An Interaction Design for AI-enhanced Assistive Human-Robot Collaboration},
author = {Max Pascher},
url = {https://dl.gi.de/items/c2314f23-2464-409d-b903-7a893b23fd75
https://portal.dnb.de/opac.htm?method=simpleSearch&cqlMode=true&query=idn%3D1340116413
https://duepublico2.uni-due.de/receive/duepublico_mods_00082229},
doi = {10.17185/duepublico/82229},
isbn = {978-3-00-079648-7},
year = {2024},
date = {2024-08-20},
urldate = {2024-08-20},
publisher = {University of Duisburg-Essen},
abstract = {The global population of individuals with motor impairments faces substantial challenges, including reduced mobility, social exclusion, and increased caregiver dependency. While advances in assistive technologies can augment human capabilities, independence, and overall well-being by alleviating caregiver fatigue and care receiver weariness, target user involvement regarding their needs and lived experiences in the ideation, development, and evaluation process is often neglected. Further, current interaction design concepts often prove unsatisfactory, posing challenges to user autonomy and system usability, hence resulting in additional stress for end users. Here, the advantages of Artificial Intelligence (AI) can enhance accessibility of assistive technology. As such, a notable research gap exists in the development and evaluation of interaction design concepts for AI-enhanced assistive robotics.
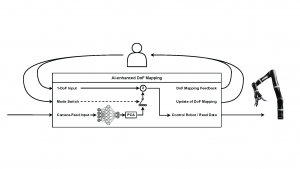
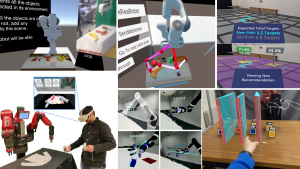
This thesis addresses the gap by streamlining the development and evaluation of shared control approaches while enhancing user integration through three key contributions. Firstly, it identifies user needs for assistive technologies and explores concepts related to robot motion intent communication. Secondly, it introduces the innovative shared control approach Adaptive DoF Mapping Control (ADMC), which generates mappings of a robot’s Degrees-of-Freedom (DoFs) based on situational Human-Robot Interaction (HRI) tasks and suggests them to users. Thirdly, it presents and evaluates the Extended Reality (XR) framework AdaptiX for in-silico development and evaluation of multi-modal interaction designs and feedback methods for shared control applications.
In contrast to existing goal-oriented shared control approaches, my work highlights the development of a novel concept that does not rely on computing trajectories for known movement goals. Instead of pre-determined goals, ADMC utilises its inherent rule engine – for example, a Convolutional Neural Network (CNN), the robot arm’s posture, and a colour-and-depth camera feed of the robot’s gripper surroundings. This approach facilitates a more flexible and situationally aware shared control system.
The evaluations within this thesis demonstrate that the ADMC approach significantly reduces task completion time, average number of necessary switches between DoF mappings, and perceived workload of users, compared to a non-adaptive input method utilising cardinal DoFs. Further, the effectiveness of AdaptiX for evaluations in-silico as well as real-world scenarios has been shown in one remote and two laboratory user studies.
The thesis emphasises the transformative impact of assistive technologies for individuals with motor impairments, stressing the importance of user-centred design and legible AI-enhanced shared control applications, as well as the benefits of in-silico testing. Further, it also outlines future research opportunities with a focus on refining communication methods, extending the application of approaches like ADMC, and enhancing tools like AdaptiX to accommodate diverse tasks and scenarios. Addressing these challenges can further advance AI-enhanced assistive robotics, promoting the full inclusion of individuals with physical impairments in social and professional spheres.},
howpublished = {eBook / Book},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
This thesis addresses the gap by streamlining the development and evaluation of shared control approaches while enhancing user integration through three key contributions. Firstly, it identifies user needs for assistive technologies and explores concepts related to robot motion intent communication. Secondly, it introduces the innovative shared control approach Adaptive DoF Mapping Control (ADMC), which generates mappings of a robot’s Degrees-of-Freedom (DoFs) based on situational Human-Robot Interaction (HRI) tasks and suggests them to users. Thirdly, it presents and evaluates the Extended Reality (XR) framework AdaptiX for in-silico development and evaluation of multi-modal interaction designs and feedback methods for shared control applications.
In contrast to existing goal-oriented shared control approaches, my work highlights the development of a novel concept that does not rely on computing trajectories for known movement goals. Instead of pre-determined goals, ADMC utilises its inherent rule engine – for example, a Convolutional Neural Network (CNN), the robot arm’s posture, and a colour-and-depth camera feed of the robot’s gripper surroundings. This approach facilitates a more flexible and situationally aware shared control system.
The evaluations within this thesis demonstrate that the ADMC approach significantly reduces task completion time, average number of necessary switches between DoF mappings, and perceived workload of users, compared to a non-adaptive input method utilising cardinal DoFs. Further, the effectiveness of AdaptiX for evaluations in-silico as well as real-world scenarios has been shown in one remote and two laboratory user studies.
The thesis emphasises the transformative impact of assistive technologies for individuals with motor impairments, stressing the importance of user-centred design and legible AI-enhanced shared control applications, as well as the benefits of in-silico testing. Further, it also outlines future research opportunities with a focus on refining communication methods, extending the application of approaches like ADMC, and enhancing tools like AdaptiX to accommodate diverse tasks and scenarios. Addressing these challenges can further advance AI-enhanced assistive robotics, promoting the full inclusion of individuals with physical impairments in social and professional spheres.

Max Pascher; Kirill Kronhardt; Jan Freienstein; Jens Gerken
Exploring AI-Enhanced Shared Control for an Assistive Robotic Arm Proceedings Article
In: Michael Harrison; Célia Martinie; Nicholas Micallef; Philippe Palanque; Albrecht Schmidt; Marco Winckler; Enes Yigitbas; Luciana Zaina (Ed.): Engineering Interactive Computer Systems. EICS 2023 International Workshops and Doctoral Consortium, pp. 102–115, Springer Nature Switzerland, Cham, 2024, ISBN: 978-3-031-59235-5.
@inproceedings{Pascher2024d,
title = {Exploring AI-Enhanced Shared Control for an Assistive Robotic Arm},
author = {Max Pascher and Kirill Kronhardt and Jan Freienstein and Jens Gerken},
editor = {Michael Harrison and Célia Martinie and Nicholas Micallef and Philippe Palanque and Albrecht Schmidt and Marco Winckler and Enes Yigitbas and Luciana Zaina},
doi = {10.1007/978-3-031-59235-5_10},
isbn = {978-3-031-59235-5},
year = {2024},
date = {2024-08-08},
urldate = {2024-08-08},
booktitle = {Engineering Interactive Computer Systems. EICS 2023 International Workshops and Doctoral Consortium},
pages = {102–115},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {Assistive technologies and in particular assistive robotic arms have the potential to enable people with motor impairments to live a self-determined life. More and more of these systems have become available for end users in recent years, such as the Kinova Jaco robotic arm. However, they mostly require complex manual control, which can overwhelm users. As a result, researchers have explored ways to let such robots act autonomously. However, at least for this specific group of users, such an approach has shown to be futile. Here, users want to stay in control to achieve a higher level of personal autonomy, to which an autonomous robot runs counter. In our research, we explore how Artificial Intelligence (AI) can be integrated into a shared control paradigm. In particular, we focus on the consequential requirements for the interface between human and robot and how we can keep humans in the loop while still significantly reducing the mental load and required motor skills.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher; Felix Ferdinand Goldau; Kirill Kronhardt; Udo Frese; Jens Gerken
AdaptiX – A Transitional XR Framework for Development and Evaluation of Shared Control Applications in Assistive Robotics Best Paper Journal Article
In: Proc. ACM Hum.-Comput. Interact., vol. 8, no. EICS, 2024, ISSN: 2573-0142.
@article{Pascher.2024,
title = {AdaptiX – A Transitional XR Framework for Development and Evaluation of Shared Control Applications in Assistive Robotics},
author = {Max Pascher and Felix Ferdinand Goldau and Kirill Kronhardt and Udo Frese and Jens Gerken},
url = {https://github.com/maxpascher/AdaptiX, AdaptiX GitHub repository },
doi = {10.1145/3660243},
issn = {2573-0142},
year = {2024},
date = {2024-06-17},
urldate = {2024-06-17},
journal = {Proc. ACM Hum.-Comput. Interact.},
volume = {8},
number = {EICS},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
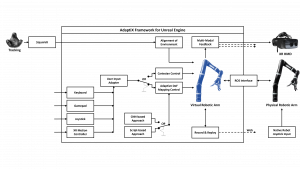
abstract = {With the ongoing efforts to empower people with mobility impairments and the increase in technological acceptance by the general public, assistive technologies, such as collaborative robotic arms, are gaining popularity. Yet, their widespread success is limited by usability issues, specifically the disparity between user input and software control along the autonomy continuum. To address this, shared control concepts provide opportunities to combine the targeted increase of user autonomy with a certain level of computer assistance. This paper presents the free and open-source AdaptiX XR framework for developing and evaluating shared control applications in a high-resolution simulation environment. The initial framework consists of a simulated robotic arm with an example scenario in Virtual Reality (VR), multiple standard control interfaces, and a specialized recording/replay system. AdaptiX can easily be extended for specific research needs, allowing Human-Robot Interaction (HRI) researchers to rapidly design and test novel interaction methods, intervention strategies, and multi-modal feedback techniques, without requiring an actual physical robotic arm during the early phases of ideation, prototyping, and evaluation. Also, a Robot Operating System (ROS) integration enables the controlling of a real robotic arm in a PhysicalTwin approach without any simulation-reality gap. Here, we review the capabilities and limitations of AdaptiX in detail and present three bodies of research based on the framework. AdaptiX can be accessed at https://adaptix.robot-research.de.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Younes Lakhnati; Max Pascher; Jens Gerken
Exploring a GPT-based Large Language Model for Variable Autonomy in a VR-based Human-Robot Teaming Simulation Journal Article
In: Frontiers in Robotics and AI, vol. 11, 2024.
@article{Lakhnati2024,
title = {Exploring a GPT-based Large Language Model for Variable Autonomy in a VR-based Human-Robot Teaming Simulation},
author = {Younes Lakhnati and Max Pascher and Jens Gerken},
editor = {Andreas Theodorou},
doi = {10.3389/frobt.2024.1347538},
year = {2024},
date = {2024-04-03},
urldate = {2024-04-02},
journal = {Frontiers in Robotics and AI},
volume = {11},
abstract = {In a rapidly evolving digital landscape autonomous tools and robots are becoming commonplace. Recognizing the significance of this development, this paper explores the integration of Large Language Models (LLMs) like Generative pre-trained transformer (GPT) into human-robot teaming environments to facilitate variable autonomy through the means of verbal human-robot communication. In this paper, we introduce a novel simulation framework for such a GPT-powered multi-robot testbed environment, based on a Unity Virtual Reality (VR) setting. This system allows users to interact with simulated robot agents through natural language, each powered by individual GPT cores. By means of OpenAI's function calling, we bridge the gap between unstructured natural language input and structured robot actions. A user study with 12 participants explores the effectiveness of GPT-4 and, more importantly, user strategies when being given the opportunity to converse in natural language within a simulated multi-robot environment. Our findings suggest that users may have preconceived expectations on how to converse with robots and seldom try to explore the actual language and cognitive capabilities of their simulated robot collaborators. Still, those users who did explore where able to benefit from a much more natural flow of communication and human-like back-and-forth. We provide a set of lessons learned for future research and technical implementations of similar systems},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Amal Nanavati; Max Pascher; Vinitha Ranganeni; Ethan K. Gordon; Taylor Kessler Faulkner; Siddhartha S. Srinivasa; Maya Cakmak; Patrícia Alves-Oliveira; Jens Gerken
Multiple Ways of Working with Users to Develop Physically Assistive Robots Proceedings Article
In: A3DE '24: Workshop on Assistive Applications, Accessibility, and Disability Ethics at the ACM/IEEE International Conference on Human-Robot Interaction, 2024.
@inproceedings{Nanavati2024,
title = {Multiple Ways of Working with Users to Develop Physically Assistive Robots},
author = {Amal Nanavati and Max Pascher and Vinitha Ranganeni and Ethan K. Gordon and Taylor Kessler Faulkner and Siddhartha S. Srinivasa and Maya Cakmak and Patrícia Alves-Oliveira and Jens Gerken},
doi = {10.48550/arXiv.2403.00489},
year = {2024},
date = {2024-03-15},
urldate = {2024-03-15},
booktitle = {A3DE '24: Workshop on Assistive Applications, Accessibility, and Disability Ethics at the ACM/IEEE International Conference on Human-Robot Interaction},
abstract = {Despite the growth of physically assistive robotics (PAR) research over the last decade, nearly half of PAR user studies do not involve participants with the target disabilities. There are several reasons for this---recruitment challenges, small sample sizes, and transportation logistics---all influenced by systemic barriers that people with disabilities face. However, it is well-established that working with end-users results in technology that better addresses their needs and integrates with their lived circumstances. In this paper, we reflect on multiple approaches we have taken to working with people with motor impairments across the design, development, and evaluation of three PAR projects: (a) assistive feeding with a robot arm; (b) assistive teleoperation with a mobile manipulator; and (c) shared control with a robot arm. We discuss these approaches to working with users along three dimensions---individual- vs. community-level insight, logistic burden on end-users vs. researchers, and benefit to researchers vs. community---and share recommendations for how other PAR researchers can incorporate users into their work.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Maciej K. Wozniak; Max Pascher; Bryce Ikeda; Matthew B. Luebbers; Ayesha Jena
Virtual, Augmented, and Mixed Reality for Human-Robot Interaction (VAM-HRI) Proceedings Article
In: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA, 2024, ISBN: 979-8-4007-0323-2/24/03.
@inproceedings{Wozniak2024,
title = { Virtual, Augmented, and Mixed Reality for Human-Robot Interaction (VAM-HRI)},
author = {Maciej K. Wozniak and Max Pascher and Bryce Ikeda and Matthew B. Luebbers and Ayesha Jena},
url = {https://vam-hri.github.io/, VAM-HRI workshop website},
doi = {10.1145/3610978.3638158},
isbn = {979-8-4007-0323-2/24/03},
year = {2024},
date = {2024-03-11},
urldate = {2024-03-11},
booktitle = {Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA},
abstract = {The 7𝑡ℎ International Workshop on Virtual, Augmented, and Mixed Reality for Human-Robot Interaction (VAM-HRI) seeks to bring together researchers from human-robot interaction (HRI), robotics, and mixed reality (MR) to address the challenges related to mixed reality interactions between humans and robots. Key topics include the development of robots capable of interacting with humans in mixed reality, the use of virtual reality for creating interactive robots, designing augmented reality interfaces for communication between humans and robots, exploring mixed reality interfaces for enhancing robot learning, comparative analysis of the capabilities and perceptions of robots and virtual agents, and sharing best design practices. VAM-HRI 2024 will build on the success of VAM-HRI workshops held from 2018 to 2023, advancing research in this specialized community. The prior year’s website is located at https://vam-hri.github.io.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher; Alia Saad; Jonathan Liebers; Roman Heger; Jens Gerken; Stefan Schneegass; Uwe Gruenefeld
Hands-On Robotics: Enabling Communication Through Direct Gesture Control Proceedings Article
In: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA, 2024, ISBN: 979-8-4007-0323-2/24/03.
@inproceedings{Pascher2024,
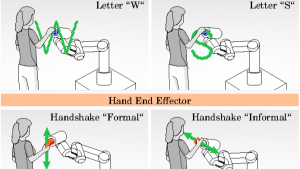
title = {Hands-On Robotics: Enabling Communication Through Direct Gesture Control},
author = {Max Pascher and Alia Saad and Jonathan Liebers and Roman Heger and Jens Gerken and Stefan Schneegass and Uwe Gruenefeld},
doi = {10.1145/3610978.3640635},
isbn = {979-8-4007-0323-2/24/03},
year = {2024},
date = {2024-03-11},
urldate = {2024-03-11},
booktitle = {Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA},
abstract = {Effective Human-Robot Interaction (HRI) is fundamental to seamlessly integrating robotic systems into our daily lives. However, current communication modes require additional technological interfaces, which can be cumbersome and indirect. This paper presents a novel approach, using direct motion-based communication by moving a robot's end effector. Our strategy enables users to communicate with a robot by using four distinct gestures -- two handshakes ('formal' and 'informal') and two letters ('W' and 'S'). As a proof-of-concept, we conducted a user study with 16 participants, capturing subjective experience ratings and objective data for training machine learning classifiers. Our findings show that the four different gestures performed by moving the robot's end effector can be distinguished with close to 100% accuracy. Our research offers implications for the design of future HRI interfaces, suggesting that motion-based interaction can empower human operators to communicate directly with robots, removing the necessity for additional hardware.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Max Pascher; Kevin Zinta; Jens Gerken
Exploring of Discrete and Continuous Input Control for AI-enhanced Assistive Robotic Arms Proceedings Article
In: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA, 2024, ISBN: 979-8-4007-0323-2/24/03.
@inproceedings{Pascher2024c,
title = {Exploring of Discrete and Continuous Input Control for AI-enhanced Assistive Robotic Arms},
author = {Max Pascher and Kevin Zinta and Jens Gerken},
doi = {10.1145/3610978.3640626},
isbn = {979-8-4007-0323-2/24/03},
year = {2024},
date = {2024-03-11},
urldate = {2024-03-11},
booktitle = {Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA},
abstract = {Robotic arms, integral in domestic care for individuals with motor impairments, enable them to perform Activities of Daily Living (ADLs) independently, reducing dependence on human caregivers. These collaborative robots require users to manage multiple Degrees-of-Freedom (DoFs) for tasks like grasping and manipulating objects. Conventional input devices, typically limited to two DoFs, necessitate frequent and complex mode switches to control individual DoFs. Modern adaptive controls with feed-forward multi-modal feedback reduce the overall task completion time, number of mode switches, and cognitive load. Despite the variety of input devices available, their effectiveness in adaptive settings with assistive robotics has yet to be thoroughly assessed. This study explores three different input devices by integrating them into an established XR framework for assistive robotics, evaluating them and providing empirical insights through a preliminary study for future developments.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Max Pascher
System and Method for Providing an Object-related Haptic Effect Patent
2024.
@patent{Pascher2024b,
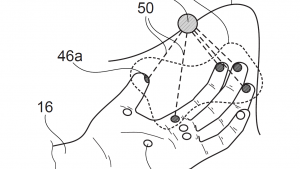
title = {System and Method for Providing an Object-related Haptic Effect},
author = {Max Pascher},
url = {https://register.dpma.de/DPMAregister/pat/register?AKZ=1020221221733, DPMAregister
https://register.dpma.de/DPMAregister/pat/PatSchrifteneinsicht?docId=DE102022122173B4&page=1&lang=de&reqToken=CN6DmGPeQHMihv_-IjJkgGSI1umAMWJdZO6njDawBxKPIF1PaCRF8pQRpxUUIXlf, Patentschrift},
year = {2024},
date = {2024-03-07},
urldate = {2024-03-07},
booktitle = {German Patent and Trade Mark Office (DPMA)},
abstract = {Die Erfindung betrifft ein computer-implementiertes Verfahren zum Bereitstellen eines auf ein Objekt (44) bezogenen haptischen Effektes in einer virtuellen oder gemischten Umgebung mittels einer Haptikvorrichtung (12), wobei die Haptikvorrichtung (12) einen an einem Körperteil (16) eines Nutzers tragbaren Träger (18), und mehrere am Träger (18) über eine Fläche (22) des Trägers (18) verteilte und mit einem Steuermodul (14) kommunikationstechnisch verbundene Aktoren (20) zum Bereitstellen eines lokalen haptischen Reizes (46) umfasst, umfassend den Schritt Generieren eines Steuersignales für die Aktoren (20) dergestalt, dass eine Ausgabe der lokalen haptischen Reize (46) einer Teilmenge (48) der Aktoren (20) zeitlich korrespondierend ihrer Nähe zum Objekt (44) erfolgt. Die Erfindung betrifft weiterhin ein Steuermodul (14), das dazu eingerichtet ist, das obige Verfahren durchzuführen. Weiterhin betrifft die Erfindung ein System (10) zum Bereitstellen eines auf ein Objekt (44) bezogenen haptischen Effektes in einer virtuellen oder gemischten Umgebung umfassend eine Haptikvorrichtung (12) und das obige Steuermodul (14).},
howpublished = {DPMAregister},
keywords = {},
pubstate = {published},
tppubtype = {patent}
}
Alia Saad; Max Pascher; Khaled Kassem; Roman Heger; Jonathan Liebers; Stefan Schneegass; Uwe Gruenefeld
Hand-in-Hand: Investigating Mechanical Tracking for User Identification in Cobot Interaction Proceedings Article
In: Proceedings of International Conference on Mobile and Ubiquitous Multimedia (MUM), Vienna, Austria, 2023.
@inproceedings{Saad2023,
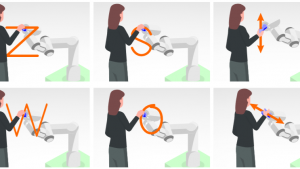
title = {Hand-in-Hand: Investigating Mechanical Tracking for User Identification in Cobot Interaction},
author = {Alia Saad and Max Pascher and Khaled Kassem and Roman Heger and Jonathan Liebers and Stefan Schneegass and Uwe Gruenefeld},
doi = {10.1145/3626705.3627771},
year = {2023},
date = {2023-12-03},
urldate = {2023-12-03},
booktitle = {Proceedings of International Conference on Mobile and Ubiquitous Multimedia (MUM)},
address = {Vienna, Austria},
abstract = {Robots play a vital role in modern automation, with applications in manufacturing and healthcare. Collaborative robots integrate human and robot movements. Therefore, it is essential to ensure that interactions involve qualified, and thus identified, individuals. This study delves into a new approach: identifying individuals through robot arm movements. Different from previous methods, users guide the robot, and the robot senses the movements via joint sensors. We asked 18 participants to perform six gestures, revealing the potential use as unique behavioral traits or biometrics, achieving F1-score up to 0.87, which suggests direct robot interactions as a promising avenue for implicit and explicit user identification.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}